Bus arbitration
Here we want to consider what we have learnt so far and about the way CAN arbitrates the bus and make some examples of how transmission happen on the bus. For all examples, we are going to cinsider a basic CAN network with 6 nodes (all producers and consumers).
Note In these examples we will not considr the bit stuffing occurring on the bus as it pointlessly complicates scenarios.
We will consider the following examples:
Binary countdown
We know that frames are handled in a distributed prioritized queue thanks to the Binary countdown. Let's visualize it in action by considering that Node 1, Node 2 and Node 3 respectively want to send messages with the following IDs:
M1 = 10011100011 [Data]
M2 = 10011110111 [Data]
M3 = 10011100011 [Remote]
It means that the frames that will be sent out are (considering CAN 2.0A frames):
M1 => 0 10011100011 0 0 0 0001 XXXXXXXX
M2 => 0 10011110111 0 0 0 0010 YYYYYYYYYYYYYYYY
M3 => 0 10011100011 1 0 0 0001
We are of course visualizing only the part from SOC to Data with some random data. Let's see what happens on the bus as soon as these nodes start transmitting at the same time.
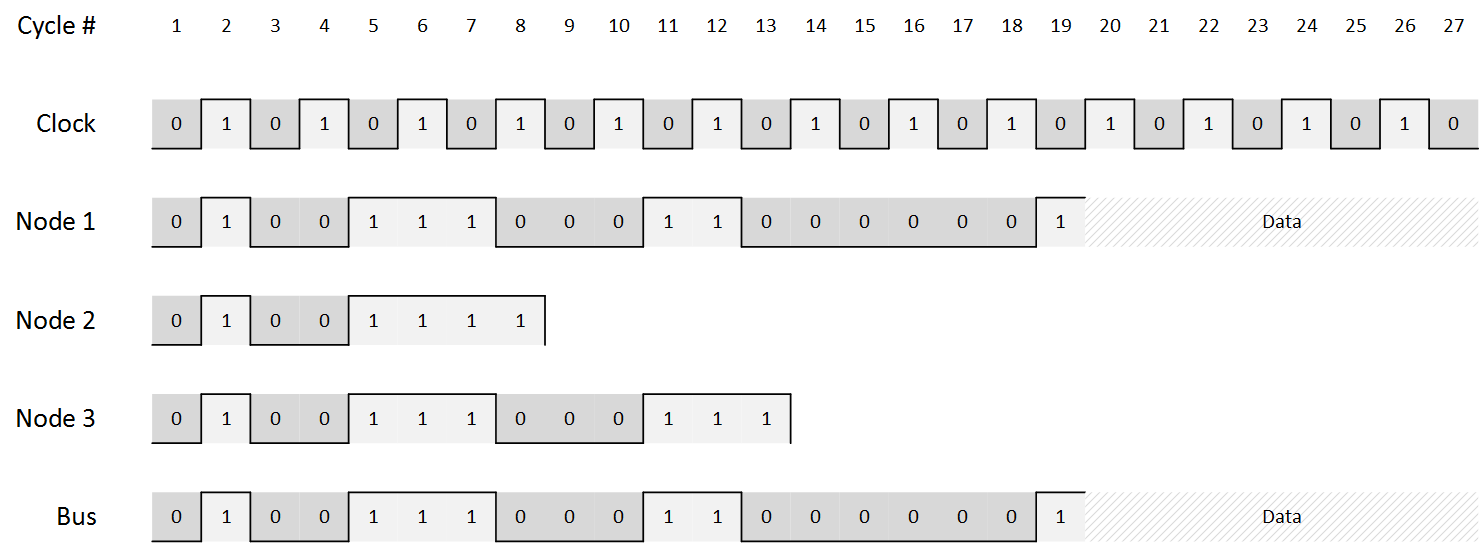
As we can see, the frame which wins the contention is M1 because M1 = M3 < M2 and M1 is a data frame which take priority on M3 which is a remote frame on the same variable.
- Until the 7th cycle, all frames generate no collision yet.
- However, at the 8th cycle
Node 2transmits1which, in AND with the other IDs, collides on the bus.Node 2only feels the collision and knows it lost the contention, thus holds off and interrupts the transmission of frameM2. Node 1andNode 2keep transmitting until the 13th cycle which marks the transmission of the RTR bit. SinceNode 1is transmitting a data frame, it takes priority overM3.Node 3will stop andNode 1will complete its transmission.
Important Remember that once a frame is being sent, other station that need to transmit something will have to wait to hear the EOF and IMF.